版权说明:
1、本文来源:具身进化。版权归相关权利人所有,转载部分是出于传递更多信息之目的。智教新媒尊重原创,如涉版权,请联系删除。
2、如果您的文章希望被智教新媒报道,请发邮件到 service@iedumedia.com公邮,会有专人在1-2个工作日回复您。
人形机器人领域正在快速发展,市场中涌现出了不同结构形态、不同技术方向、不同功能水平的人形机器人相关产品。为统一人形机器人领域的技术语言、规范人形机器人技术产品的发展路径,特制定本指南,定义人形机器人领域相关术语,并对人形机器人领域产品进行分类分级,为人形机器人大规模的研发生产应用奠定基础。
本文件规定了人形机器人领域分类分级的原则、方法。本文件适用于人形机器人领域。
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
3.1通用术语
3.1.1 机器人robot
具有一定程度的自主能力,可在其环境内运动以执行预期任务的可编程执行机构。
人形机器人humanoid robot
具有类似于人的躯干、头部、四肢和关节,外观和动作与人类相似,基于通用具身智能来实现的感知、认知、决策、执行等能力的机器人。
3.1.3 泛人形机器人pan-humanoid robot
具有部分类似于人的外观或能够实现感知、认知、决策、执行中部分能力的机器人
3.1.4 非人形机器人non-humanoid robot
不具备类似人的外观,基于特定任务需求设计的机器人。
3.1.5仿人机器人anthropomorphic robot
具有躯干、头和四肢,外观和动作与人类相似的机器人。
3.1.6 固化环境rigid environment
非常稳定且变化极小的环境。
3.1.7 结构化环境structured environment
相对有序和可预测的环境,其中的条件和参数遵循一定的规律变化。
3.1.8 开放环境open environment
不受严格控制的环境,其中的条件和参数不遵循规律变化。
3.1.9 动态环境 dynamic environment
3.2结构相关术语
3.2.1 人形机器人躯干humanoid robot torso
构成人形机器人主要支撑和运动部分的身体结构,由胸腔、腰部和髋部等组成
3.2.2 人形机器人头部humanoid robothead
模仿人类头部形态和功能的机器人部件。
3.2.3 机器人腿robotic leg
通过往复运动与行走面的周期性接触来支撑及推进机器人的杆件机构。
3.2.4 人形机器人足部humanoid robot foot
模仿人类足部结构和功能的机器人部件,用于支撑机器人体重并实现行走、平衡等移动功能。
3.2.5 机器人手臂robotic arm
操作机上一组互相连接的长形的杆件和主动关节,用以定位手腕。
3.2.6 机器人手腕robotic wrist
3.3智能相关术语
3.3.1 智能intelligence
具有人类或类似人类智慧特征的能力。
注:人类或类似人类的智慧特征,表现为在实现某个目的的过程中,总会经历一个或多个的感知、决策、执行的过程或过程循环。并在其中通过不断学习,提高自身实现目的的能力和实现目的的效率与效果;本文件认为,在体现人类或类似人类的智慧特征上,感知、决策、执行和在其中的学习的各项能力和过程具有不可或缺性。
3.3.2 人工智能系统artificial intelligence system
针对人类定义的给定目标,产生诸如内容、预测、推荐或决策等输出的一类工程系统。
注1:该工程系统使用人工智能相关的多种技术和方法,开发表征数据,知识,过程等的模型,用于执行任务。注2:人工智能系统具备不同的自动化级别。
3.3.3 通用人工智能artificial general intelligence
具备与人类同等智能、或超越人类的人工智能,能表现正常人类所具有的所有智能行为。
3.3.4 狭义人工智能artificial narrow intelligence
是实现部分思维的人工智能,且仅专注于某项特定任务。狭义人工智能专注于模仿人类如何执行基本动作,例如记忆或感知事物、解决简单问题。
3.3.5 通用具身智能general embodied artificial intelligence
人工智能系统通过其物理实体与环境进行实时交互,从而获得感知、认知和行动能力,实现自主学习、决策和适应性。
3.3.6 感知perception
通过各种传感技术获取信息并处理使机器人具备识别判断自身及周边环境的状态的能力。
3.3.7 认知cognition
机器人利用多传感信息进行建模、推理、规划、学习和理解的能力。
3.3.8 决策decision-making
机器人通过建立领域专家知识库问题求解子系统和机器学习等方法,完成特定任务解决方案的能力。
3.3.9 自主能力autonomy
基于当前状态和感知信息,无人为干预地执行预期任务的能力。
3.3.10 多模态multimodality
集成多种不同类型的信息和数据,以提供更丰富、更全面的交互体验和数据分析
3.3.11 机器学习machine learning
通过计算技术优化模型参数的过程,使模型的行为反映数据或经验。
3.3.12 模型训练model training
利用训练数据,基于机器学习算法,确定或改进机器学习模型参数的过程。
4.1 分类原则
根据GB/T39405-2020列出以下分类原则:
a)宜从多个维度进行分类;
b)同一维度下应该避免交叉重叠,应该尽可能覆盖各种机器人;
4.2 分类方法
4.2.1外观结构分类
a)相似于人类结构和外观;
b)部分相似于人类结构和外观;
c)不具备相似于人类结构和外观。
4.2.2移动方式分类
a)腿式运动;
b)轮式运动;
c)履带式运动。
4.2.3智能模型分类
a)通用人工智能;
b)狭义人工智能。
5.1分级原则
5.2分级要素
基于以下要素对人形机器人的技术等级进行划分:
a)具身智能;
b)下肢运动;
c)上肢作业;
5.3等级划分
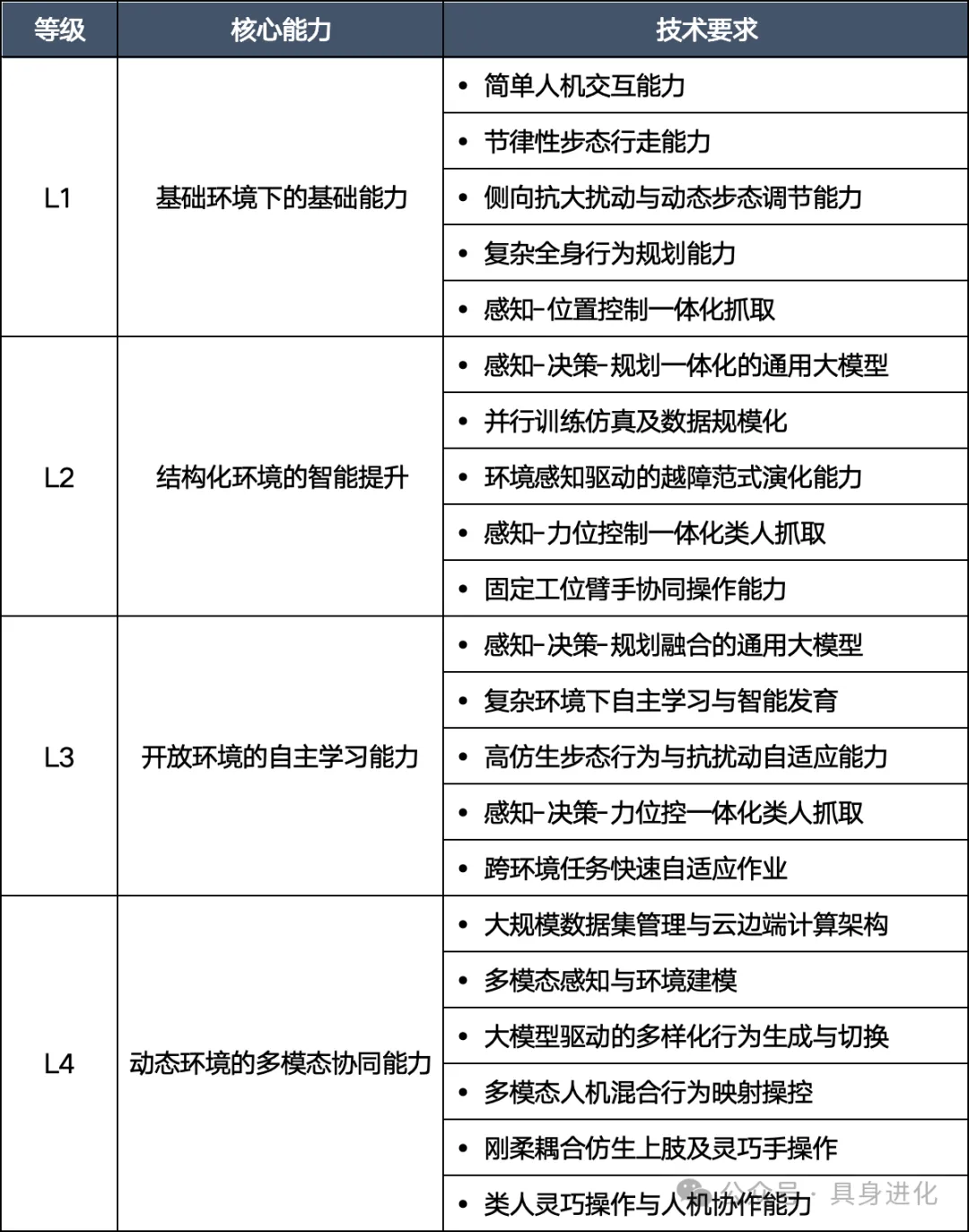
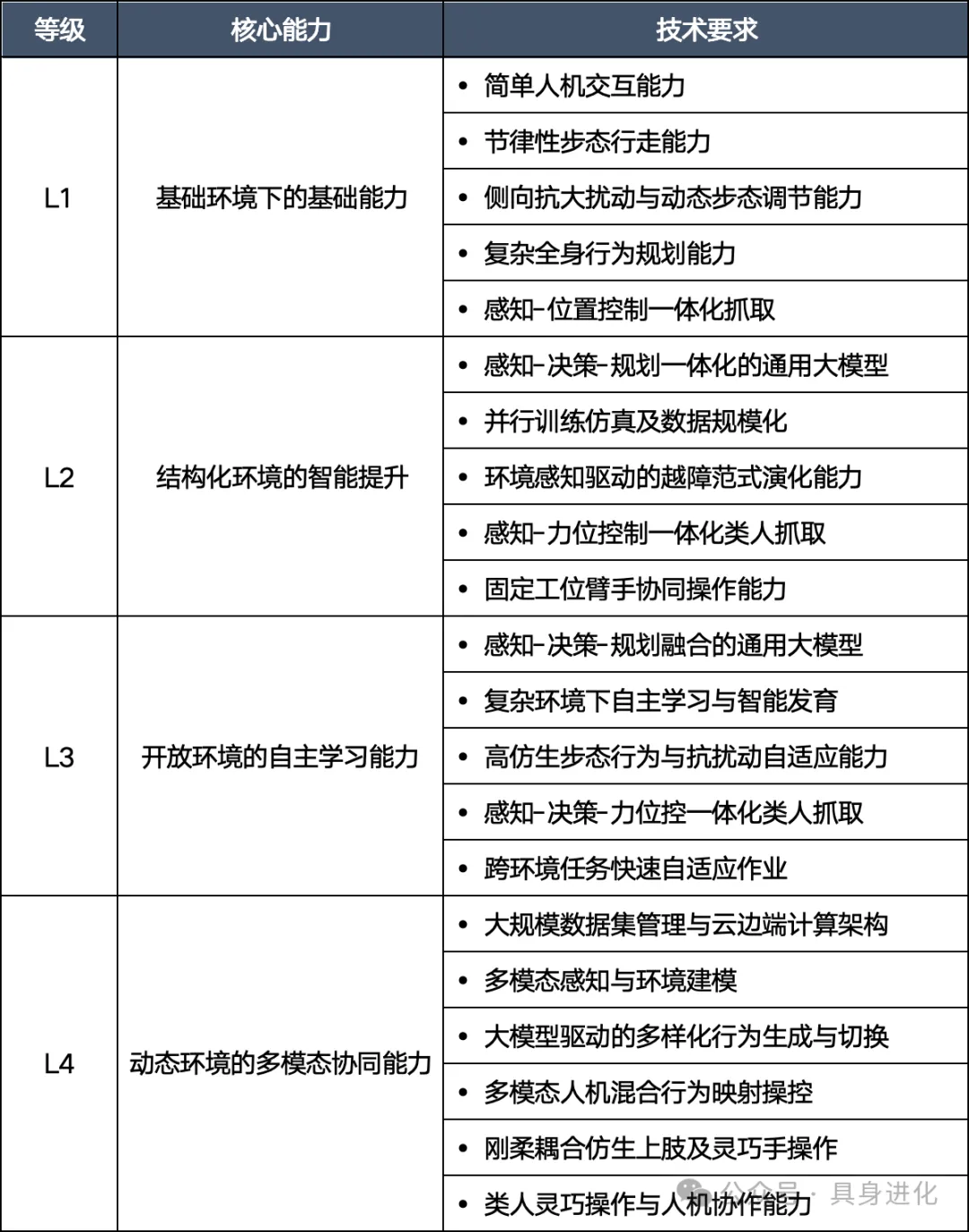
5.3.1 1级技术等级人形机器人
1级技术等级(Level1,L1)人形机器人具有在固化环境中进行具身智能基础应用、节律步态行为与抗大扰动运动控制、基于虚拟现实设备进行遥操作控制作业的能力。
5.3.2 2级技术等级人形机器人
2级技术等级(Level2,L2)人形机器人具有在结构化环境中进行具身智能有条件应用、环境与行为驱动下的运动范式演化、高精度抓取的能力。
5.3.3 3级技术等级人形机器人
3级技术等级(Level3,L3)人形机器人具有在开放环境中进行具身智能高程度应用、高仿生高韧性自主运动、高效自主作业的能力。
5.3.4 4级技术等级人形机器人
5.4 各等级技术要求
5.4.1 1级技术等级人形机器人
1级技术等级人形机器人应满足以下要求:
a)简单人机交互能力;
b)节律性步态行走能力;
c)侧向抗大扰动与动态步态调节能力;
d)复杂全身行为规划能力;
e)感知-位置控制一体化抓取。
5.4.2 2级技术等级人形机器人
2级技术等级人形机器人应满足以下要求:
a)感知-决策-规划一体化的通用大模型;
b)实现并行训练仿真及数据规模化;
c)环境感知信息驱动下的越障范式演化能力;
d)感知-力位控制一体化下的类人灵巧抓取;
e)固定工位臂手协同操作能力。
5.4.3 3级技术等级人形机器人
3级技术等级人形机器人应满足以下要求:
a)感知-决策-规划融合的通用大模型;
b)复杂环境下的自主学习训练与智能发育;
c)强对标人高仿生步态行为与抗扰动自适应能力;
d)感知-决策-力位控一体化下的类人灵巧抓取;
e)不同环境和任务下的快速自适应作业。
5.4.4 4级技术等级人形机器人
4级技术等级人形机器人应满足以下要求:
a)大规模数据集管理,云边端一体计算架构;
b)多模态感知与环境建模;
c)大模型驱动下多样化行为生成与平滑切换能力;
d)多模态人机混合行为映射与操控能力;
e)刚柔耦合、高紧凑仿生上肢结构及灵巧手操作;
f)类人灵巧操作与人机协作能力。

关注智教新媒公众号